根据不同需求和环境,两种形态自由切换
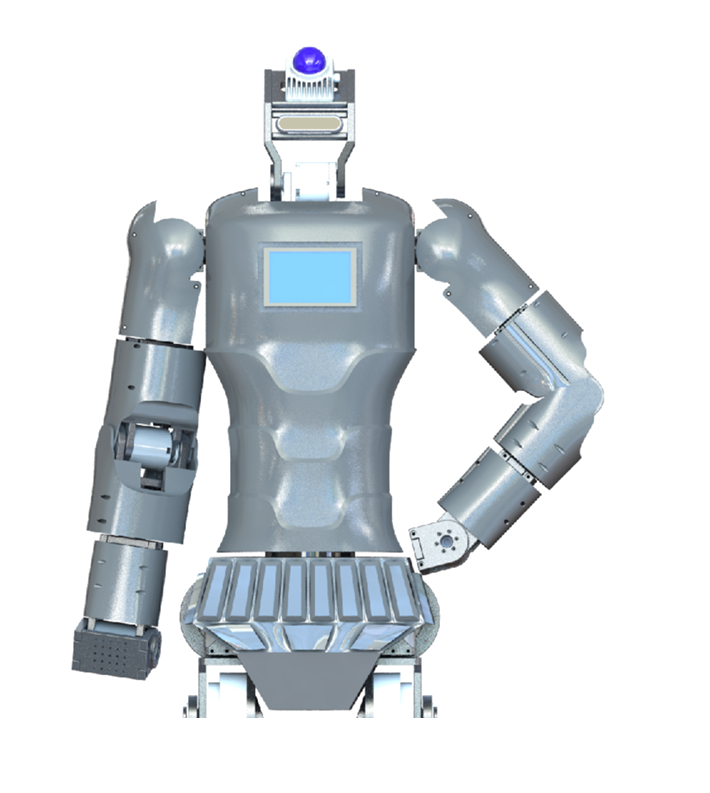
高分辨率的视觉摄像头和先进的视觉识别算法
根据实际需求更换显示与视觉、手部模块
第二代轮式机器人,专为平坦地形设计,提供高效稳定的移动解决方案
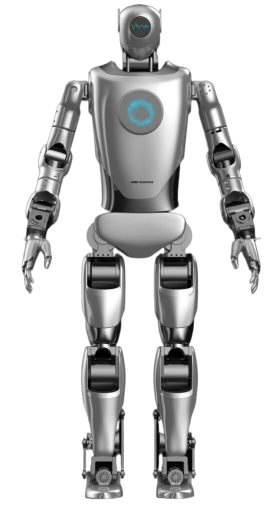
第二代足式机器人,继承一代优势,优化运动性能,增强环境适应性
通过深度摄像机捕捉或者输入视频模仿学习各类动作。
通过模仿学习与强化学习,让机器人运动更加平稳
使得关节运动更加灵活、平稳且安全。